The spectrum of a ring
The GIT quotient that we will introduce in the next paragraph is defined in term of the spectrum of a ring (in this case, the ring of polynomial invariants under the action of a group). It is useful to review this construction before we proceed. For a good explanation, see Vakil's notes here.
If $A$ is a ring, the spectrum of $A$, denoted $\mathrm{Spec} \, A$, is the set of all prime ideals in $A$. An element $a \in A$ is called a function on $\mathrm{Spec} \, A$, and the value of this function at a prime ideal $p$ is simply $a$ modulo $p$.
It is very rewarding to take some time to think about the previous definitions, and then to look at some simple examples. For instance, in the case $A = \mathbb{C}[x]$, everything is elementary, and one finds that the spectrum is the complex line, plus a point that is everywhere at the same time. In a sense, this additional "point" has dimension 1, and we see that the spectrum has "points" of various dimensions. I will probably talk about that in more detail another time, but for the moment I refer to Vakil's very illuminating list of examples.
Overview of GIT
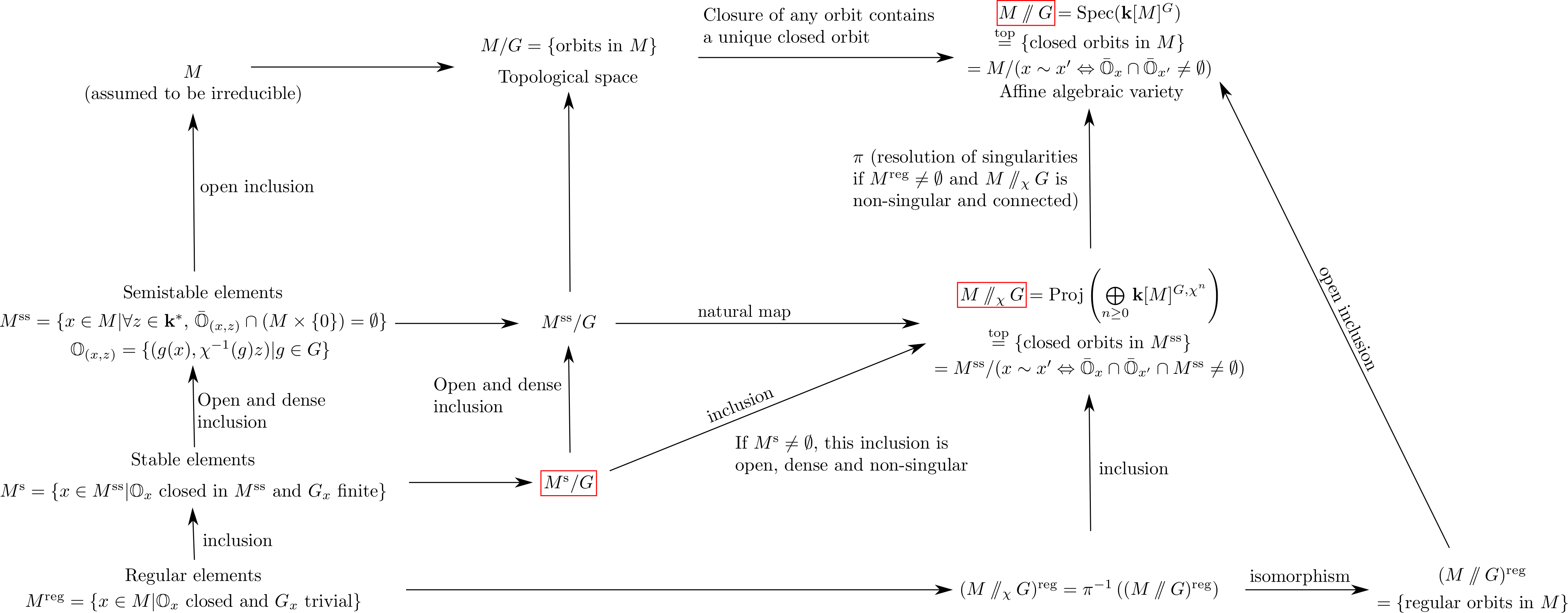
Let $G$ be a reductive linear algebraic group acting algebraically on an affine algebraic variety $M$. We recall that
- Each orbit is a non-singular subvariety of $M$
- For every orbit $\mathbb{O}$, the boundary of $\mathbb{O}$ (i.e. the complement of $\mathbb{O}$ in its closure) is a union of orbits of lower dimension.
Symplectic geometry and Hamiltonian reduction
On any symplectic manifold $M$ (i.e. such that there is a 2-form $\omega \in \Omega^2(M)$ which is closed and non-degenerate), there is a notion of skew-gradient. Indeed, for any function $f$ on $M$ (more properly, we should say that $f$ is a local section of the structure sheaf of $M$), there is a unique vector field $X_f$ such that $\omega (\cdot , X_f) = \mathrm{d}f$. This is analogous to the standard definition of the gradient, but using the symplectic form instead of the metric.
Any symplectic manifold is a Poisson manifold, i.e. we can define a Poisson bracket between functions on $M$. This is done through the skew-gradient construction. Recall that a Poisson bracket is a bilinear antisymmetric morphism $\{\cdot , \cdot \} : \mathcal{O}_M \times \mathcal{O}_M \rightarrow \mathcal{O}_M$ (where $\mathcal{O}_M$ is the structure sheaf, which we identify here to its local sections) which satisfies the Jacobi identity and the Leibniz derivation property. Here, the Poisson bracket is given by $\{f,g\} = \omega (X_f , X_g)$.
Let $M$ be a symplectic manifold and let $G$ be an appropriate1 Lie group acting on $M$ and preserving the symplectic form. An element $a \in \mathfrak{g}$ defines a vector field $\xi_a$ on $M$, and this vector field preserves $\omega$ (in the sense that the Lie derivative of $\omega$ with respect to $\xi_a$ vanishes). One can show that locally, such a vector field is always the skew-gradient of some function. So there exist functions $H_a$, called the Hamiltonians, such that $\xi_a = X_{H_a}$. We would like to define a "good situation" in which the Poisson bracket of the Hamiltonians and the Lie bracket in the Lie algebra correspond to the same operation, and where the Hamiltonians $H_a$ depend linearly on $a \in \mathfrak{g}$. When we are in this good situation, we say that the action of $G$ is Hamiltonian.
To formalize this, we will introduce the key concept of moment map. More precisely, we say that a symplectic action of $G$ on $M$ is Hamiltonian if there exists a $G$-equivariant map $\mu : M \rightarrow \mathfrak{g}^\ast$, called the moment map, such that
- The Hamiltonian of the vector field $\xi_a$ is given by $H_a(x) = \langle \mu(x),a \rangle$;
- For any $a,b \in \mathfrak{g}$, $\{H_a , H_b \} = H_{[a,b]}$.
A very important example of Hamiltonian action is given by the action of the cotangent bundle. Let $X$ be a manifold with an action of $G$. Then the corresponding action on $T^{\ast}X$ is Hamiltonian, the moment map being given by $\langle \mu (x,\lambda) , a \rangle = \langle \lambda , \xi_a (x) \rangle$, for $x \in X$, $\lambda \in T_x^\ast X$ and $a \in \mathfrak{g}^\ast$. In that case, if we assume furthermore that the action of $G$ is free, then $\mu^{-1}(0)/G$ is a smooth manifold, called the (a) Hamiltonian reduction, and by a theorem of Mardsen and Weinstein, the space $\mu^{-1}(0)/G$ has a canonical structure of a symplectic manifold, inherited from $T^{\ast}X$. We then have the symplectomorphism $$T^{\ast}(X/G) = \mu^{-1}(0)/G \, . $$
Resolutions
Now we want to combine the concepts of the two previous sections, namely GIT and Hamiltonian reductions. The problem is natural: how to generalize the construction of the Hamiltonian reduction $\mu^{-1}(0)/G$ when the action of $G$ is not free, and therefore $\mu^{-1}(0)/G$ is not smooth? We will use GIT. Define $$\mathcal{M}_0 = \mu^{-1}(0) // G \, , \qquad \mathcal{M}_\chi = \mu^{-1}(0) //_{\chi} G \, $$ for a character $\chi : G \rightarrow \mathbf{k}^{\ast}$.
Then one can prove that for any $\chi$, $\mathcal{M}_\chi$ has a Poisson structure, and the morphism $\pi : \mathcal{M}_\chi \rightarrow \mathcal{M}_0$ is a Poisson morphism and a resolution of singularities.
Reference
[1] Kirillov, Quiver representations and quiver varieties. Vol. 174. American Mathematical Soc., 2016.
1. Here "appropriate" refers to the fact that I didn't specify exactly what I mean by "manifold". If we work with real $\mathcal{C}^{\infty}$ manifolds, then I mean a real Lie group. If we work with non-singular algebraic varieties over an algebraically closed field, I mean a linear algebraic group. ]]>